جلسه دفاع پایان نامه: میلاد زارعی، گروه سیستمهای اقتصادی و اجتماعی
خلاصه خبر:
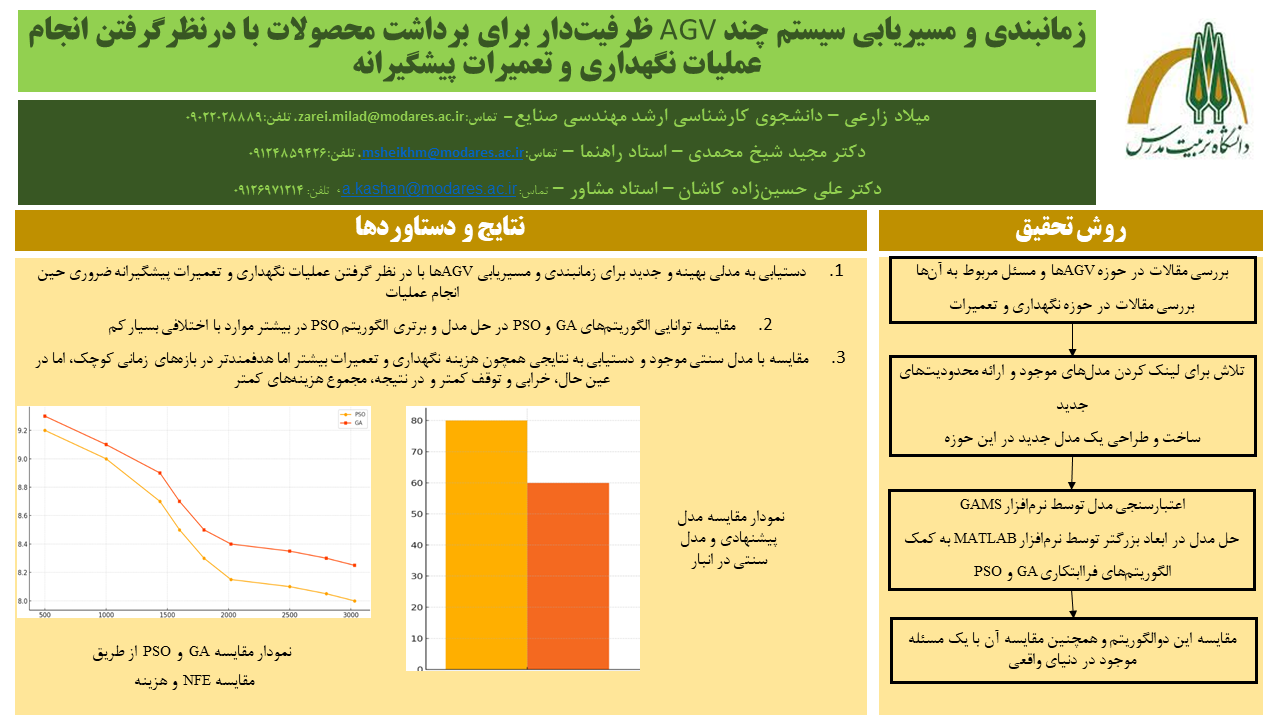
عنوان پايان نامه: زمانبندي و مسيريابي سيستم چند AGV ظرفيت دار براي برداشت محصولات با درنظرگرفتن انجام عمليات نگهداري و تعميرات پيشگيرانه
ارائه کننده: میلاد زارعی
استاد راهنما: دكتر مجيد شيخ محمدي
استاد مشاور: دكتر علي حسين زاده كاشان
استاد داور داخلي: دكتر مهرداد كارگري
استاد داور خارج از دانشگاه: دكتر عماد روغنيان
نماينده تحصيلات تكميلي: دكتر مهرداد كارگري
تاریخ: ۱۴۰۴/۰۶/۲۴
ساعت: ۱۳
مكان: اتاق 351 دانشكده فني و مهندسي
چکیده:
وسایلنقلیه هدایتشونده خودکار(AGVها) بهعنوان یکی از فناوریهای کلیدی صنعت 4.0، نقش مهمی در بهبود عملکرد سیستمهای تولید انعطافپذیر و انبارهای هوشمند ایفا میکنند. این فناوری نه تنها موجب افزایش ایمنی نیروی انسانی در محیطهای صنعتی میشود، بلکه با بهینهسازی فرایندهای انتقال، برداشت و نگهداری محصولات، سرعت و کارایی عملیات را بهطور چشمگیری افزایش میدهد. در این پایاننامه یک مدل بهینهسازی برای زمانبندی و مسیریابی چند AGV ظرفیتدار با هدف برداشت محصولات ارائه شده است با که در آن عملیات نگهداری و تعمیرات پیشگیرانه نیز بهعنوان بخشی از محدودیتها و تابع هدف مسئله در نظر گرفته میشود. مسئله مطرح شده با تمرکز بر برنامهریزی بهینه زمان تعمیرات، تلاش میکند تا عملکرد کلی سیستم را در مواجهه با محدودیتها و احتمال خرابی در شرایط واقعی بهبود بخشد و از منابع موجود به شکلی نزدیکتر به حالت بهینه استفاده نماید. اهمیت این پژوهش در آن است که برای نخستین بار، تصمیمگیری مربوط به زمانبندی تعمیرات پیشگیرانه AGVها را با مسئلهی مسیریابی و زمانبندی آنها یکپارچه نموده و بدینوسیله چارچوبی عملیاتی و واقعگرایانه برای استفاده از این وسایل در محیطهای صنعتی ارائه میدهد. مدل پیشنهادی ابتدا با استفاده از نرمافزار GAMS بر روی نمونه مسائل کوچک پیادهسازی و آزموده شد که صحت ساختار و عملکرد منطقی آن را تأیید کرد. در ادامه برای مسائل با مقیاس بزرگتر، مدل با بهرهگیری از الگوریتمهای فراابتکاری الگوریتم ژنتیک(GA) و بهینهسازی ازدحام ذرات(PSO) در محیط MATLAB حل شد. نتایج حاصل از تحلیلهای انجام شده نشان داد که مدل پیشنهادی قادر است بصورت مؤثری برنامهریزی ترکیبی زمانبندی، مسیریابی و نگهداری را برای سیستمهای چند AGV پیادهسازی کند. از مهمترین یافتههای پژوهش میتوان به این موضوع اشاره کرد که اگرچه اجرای مدل ممکن است در کوتاه مدت منجر به افزایش نسبی هزینههای عملیاتی گردد، اما در بلند مدت موجب کاهش قابل توجه هزینههای کلی سیستم، از جمله هزینههای ناشی از خرابی، توقف عملیات و مصرف انرژی میشود. علاوهبر این، گنجاندن برنامهریزی نگهداری و تعمیرات پیشگیرانه در ساختار مدل، باعث افزایش عمر مفید وسایلنقلیه هدایتشونده خودکار و کاهش فرسودگی زودهنگام آنها شده که خود عاملی مهم در بهبود پایداری و بهرهوری بلندمدت سیستم محسوب میشود.