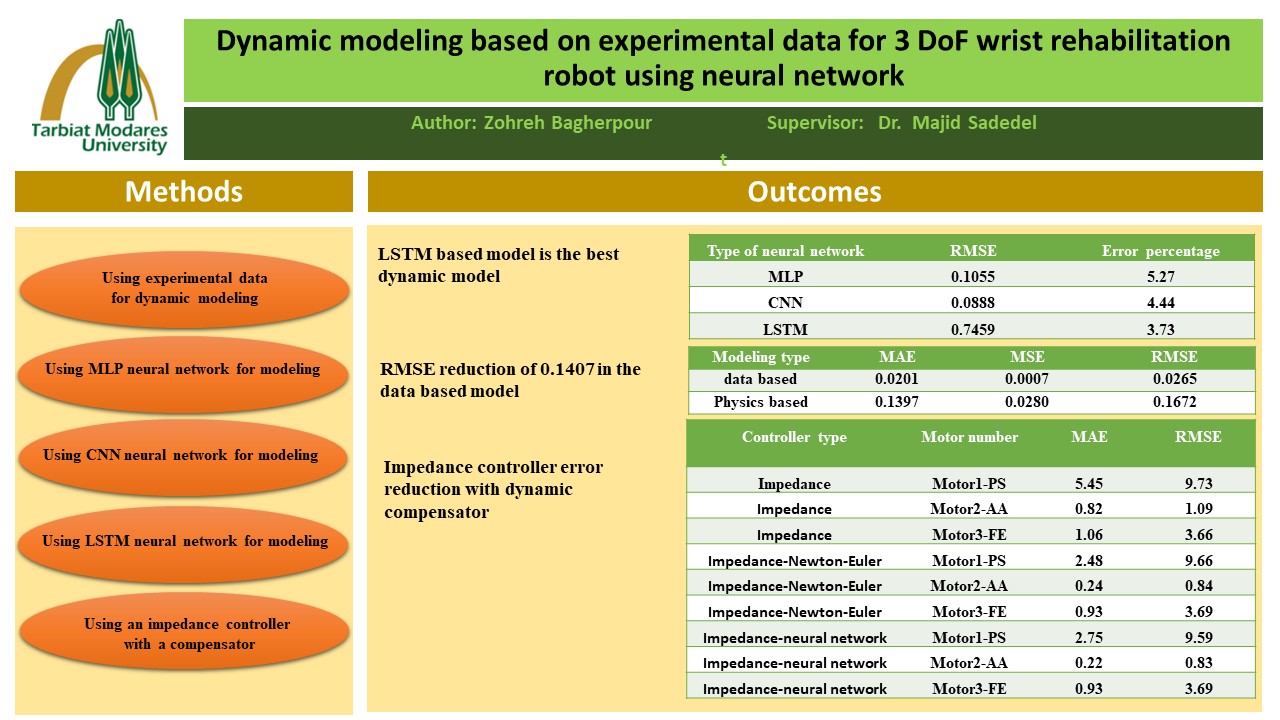
چکیده: مدلسازی دقیق دینامیک سیستم و طراحی کنترلکنندههای کارآمد، از چالشهای اصلی در رباتهای توانبخشی بهویژه رباتهای مچ دست است. مدلهای فیزیکی به دلیل پیچیدگیهای محاسباتی و نیاز به پارامترهای دقیق، ممکن است نتوانند دقت لازم را در پیشبینی رفتار سیستمهای پیچیده فراهم کنند. بهدنبال این محدودیتها، استفاده از روشهای یادگیری ماشین بهویژه شبکههای عصبی بهعنوان یک رویکرد نوین برای مدلسازی دینامیکی این سیستمها پیشنهاد شده است. این تحقیق به مقایسه و تحلیل سه مدل مختلف شبکه عصبی شامل پرسپترون چندلایه، شبکه عصبی پیچشی و شبکه عصبی حافظه کوتاهمدت بلند پرداخته و هدف آن بهبود دقت مدلسازی دینامیکی ربات توانبخشی مچ دست بوده است. نتایج نشان داد که هر سه مدل شبکه عصبی توانستند به دقت قابل قبولی در مدلسازی دینامیک سیستم دست یابند و میزان خطای مدلسازی در تمامی شبکهها کمتر از 6 درصد بود. با این حال، شبکه حافظه کوتاهمدت بلند بهدلیل قابلیتهای خود در پردازش دادههای توالیدار و یادگیری الگوهای زمانی، بهترین عملکرد را از خود نشان داد و توانست خطای مدلسازی را به 3.73 درصد کاهش دهد. علاوه بر این، مدل مبتنی بر شبکه عصبی نسبت به مدل فیزیکی دقت بالاتری در پیشبینی رفتار سیستم داشت و توانست میانگین جذر مربعات خطا را در پیشبینی گشتاورهای موتور به میزان 0.1407 نیوتون متر نسبت به مدل فیزیکی کاهش دهد. در بخش کنترل امپدانس، شبیهسازیها نشان داد که کنترلکننده امپدانس بهتنهایی قادر به جبران کامل خطاهای سیستم نیست و همچنان خطاهایی در عملکرد موتورها وجود دارد. اما با استفاده از جبرانسازهای دینامیکی مبتنی بر مدل فیزیکی یا شبکه عصبی، عملکرد سیستم بهطور چشمگیری بهبود یافته و قادر به جبران خطاهای دینامیکی سیستم شد.